解决Python计算矩阵乘向量,矩阵乘实数的一些小错误
计算:Ax-b
A: 2*2
x: 2*1
b: 2*1
so, Ax-b: 2*1
if __name__ == "__main__":
A = np.array([[4.0, 1.0],
[1.0, 3.0]])
b = np.array([[1.0], [2.0]])
x_0 = np.array([[2.0], [1.0]])
r_k = A * x_0 - b
print(r_k)
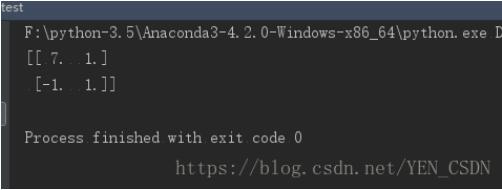
错误!!!
修改:
if __name__ == "__main__":
A= mat([[4.0, 1.0],
[1.0, 3.0]])
b = mat([[1.0], [2.0]])
x_0 = mat([[2.0], [1.0]])
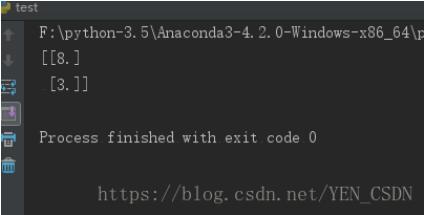
r_k = A * x_0 - b
print(r_k)
if __name__ == "__main__":
A= mat([[4.0, 1.0],
[1.0, 3.0]])
b = mat([[1.0], [2.0]])
x_k = mat([[2.0], [1.0]])
p_k = -x_k # 2行1列
r_k = A * x_k - b # 2行1列
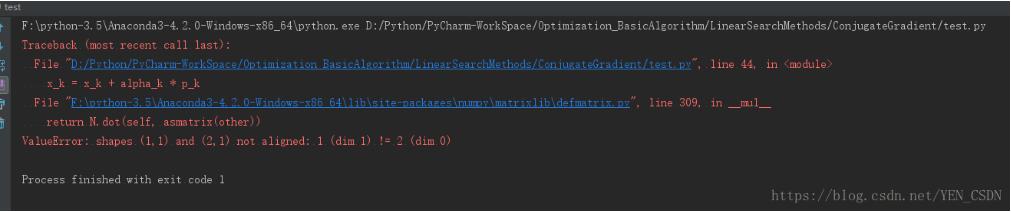
alpha_k = (np.transpose(r_k) * r_k) / (np.transpose(p_k) * A * p_k) # 1行1列
-----------------------------------------------
x_k = x_k + alpha_k * p_k #2行1列 !!!!这里报错
-----------------------------------------------
print(x_k)
修改:
if __name__ == "__main__":
A= mat([[4.0, 1.0],
[1.0, 3.0]])
b = mat([[1.0], [2.0]])
x_k = mat([[2.0], [1.0]])
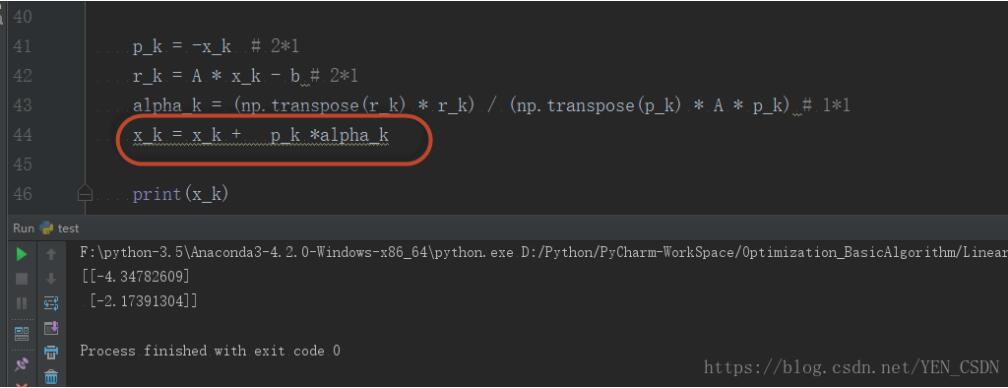
p_k = -x_k # 2*1
r_k = A * x_k - b # 2*1
alpha_k = (np.transpose(r_k) * r_k) / (np.transpose(p_k) * A * p_k) # 1*1
-----------------------------------------------
x_k = x_k + p_k *alpha_k
-----------------------------------------------
print(x_k)
以上这篇解决Python计算矩阵乘向量,矩阵乘实数的一些小错误就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持【听图阁-专注于Python设计】。